Keep CALM and Explore: Language Models for Action Generation in Text-based Games
Shunyu Yao, Rohan Rao, Matthew Hausknecht, Karthik Narasimhan
Language Grounding to Vision, Robotics and Beyond Long Paper

You can open the pre-recorded video in a separate window.
Abstract:
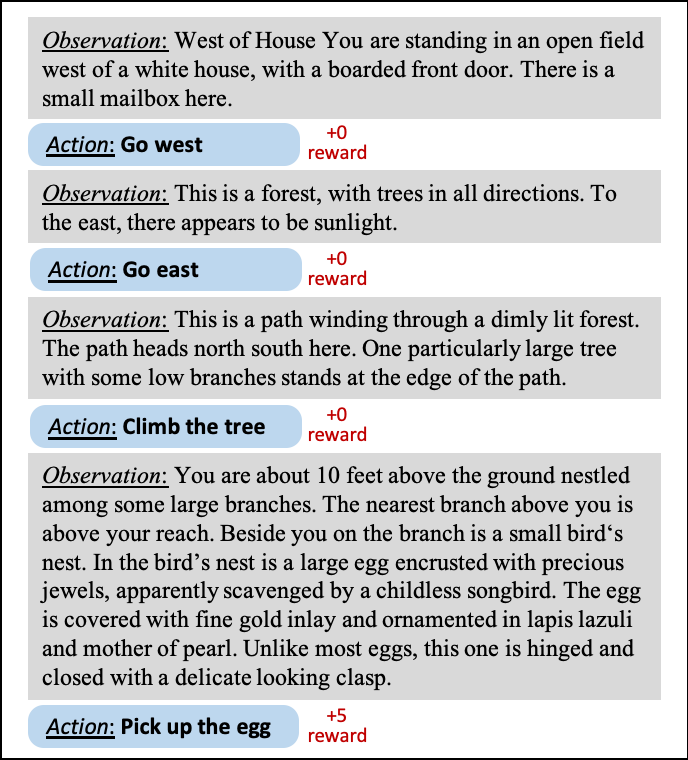
Text-based games present a unique challenge for autonomous agents to operate in natural language and handle enormous action spaces. In this paper, we propose the Contextual Action Language Model (CALM) to generate a compact set of action candidates at each game state. Our key insight is to train language models on human gameplay, where people demonstrate linguistic priors and a general game sense for promising actions conditioned on game history. We combine CALM with a reinforcement learning agent which re-ranks the generated action candidates to maximize in-game rewards. We evaluate our approach using the Jericho benchmark, on games unseen by CALM during training. Our method obtains a 69% relative improvement in average game score over the previous state-of-the-art model. Surprisingly, on half of these games, CALM is competitive with or better than other models that have access to ground truth admissible actions. Code and data are available at https://github.com/princeton-nlp/calm-textgame.
NOTE: Video may display a random order of authors.
Correct author list is at the top of this page.
Connected Papers in EMNLP2020
Similar Papers
Interactive Fiction Game Playing as Multi-Paragraph Reading Comprehension with Reinforcement Learning
Xiaoxiao Guo, Mo Yu, Yupeng Gao, Chuang Gan, Murray Campbell, Shiyu Chang,
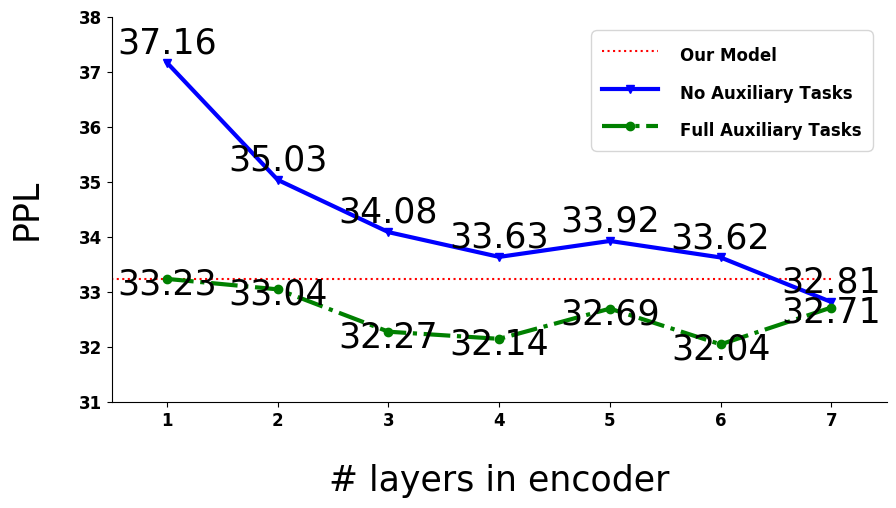
Learning a Simple and Effective Model for Multi-turn Response Generation with Auxiliary Tasks
Yufan Zhao, Can Xu, Wei Wu,
Task-Oriented Dialogue as Dataflow Synthesis
Jacob Andreas, John Bufe, David Burkett, Charles Chen, Josh Clausman, Jean Crawford, Kate Crim, Jordan DeLoach, Leah Dorner, Jason Eisner, Hao Fang, Alan Guo, David Hall, Kristin Hayes, Kellie Hill, Diana Ho, Wendy Iwaszuk, Smriti Jha, Dan Klein, Jayant Krishnamurthy, Theo Lanman, Percy Liang, Christopher Lin, Ilya Lintsbakh, Andy McGovern, Alexander Nisnevich, Adam Pauls, Brent Read, Dan Roth, Subhro Roy, Beth Short, Div Slomin, Ben Snyder, Stephon Striplin, Yu Su, Zachary Tellman, Sam Thomson, Andrei Vorobev, Izabela Witoszko, Jason Wolfe, Abby Wray, Yuchen Zhang, Alexander Zotov, Jesse Rusak, Dmitrij Petters,

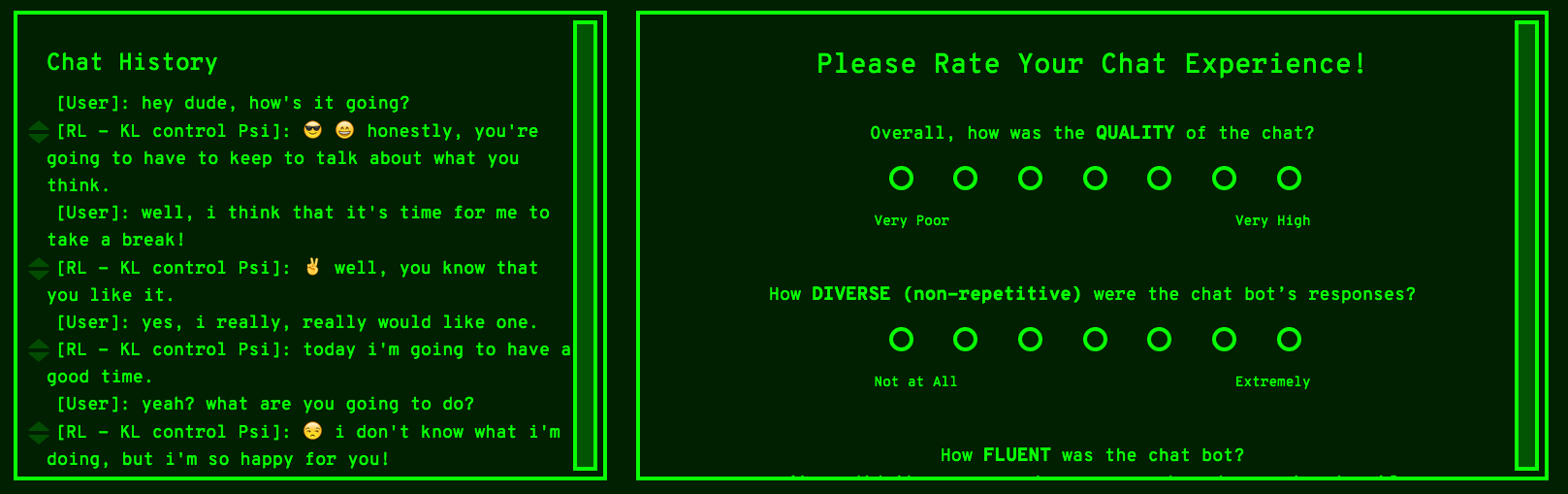
Human-centric dialog training via offline reinforcement learning
Natasha Jaques, Judy Hanwen Shen, Asma Ghandeharioun, Craig Ferguson, Agata Lapedriza, Noah Jones, Shixiang Gu, Rosalind Picard,